Hover
Contents
Hover¶
An isolated rotor is difficult to simulate… the rotor community requires many more elements of the hovering rotorcraft to be reliably and swiftly simulated.
AIAA Rotorcraft Hover Prediction Workshop
We used the momentum theory to analyse the thrust, power and induced velocity relationships for a rotor in hover and in climb. A ton of assumptions were introduced in order to be able to form nice closed-form analytical expressions that can be used to do quick back-of-the-envelope calculations easily. Even though the induced power factor \(\kappa\) was introduced for a more accurate estimate of induce power, by accounting for some of the effects not accounted for in momentum theory, the reality is far more complex and some of it is further discussed below. Suffice it to say that some of the brightest minds in the field of rotor aerodynamics get together on a regular basis holding conferences and workshops to share advancements that they’ve made towards accurately predicting every aspect of a hovering rotor using CFD from first principles. These include rotor power consumption, thrust generated, trim angles, tip vortex motion in wake etc.
Ideal hover scenario
The blade aerodynamics is steady in hover since no variation occurs over one rotor revolution. A specific amount of rotor collective is applied and the rotor cyclics are zero. The result is a net thrust vector that is along the rotor shaft. Consequently, zero pitch and roll moments are generated.
Real hover scenario
Helicopter center of gravity (CG) does not lie exactly below the rotor shaft. Fuel consumption, ingress/egress of equipment or passengers, payload drop etc. are some of the mechanisms via which CG might move about during hover. Even pilots shifting in their seats will affect the CG. Clearly CG directly below the rotor shaft is an unrealistic expectation. So symmetric lift distribution over the rotor disk in hover is not viable. Uneven blockage effects from the fuselage, disturbance from the air, minor differences in blade construction (manufacturing defects) etc. exacerbate this situation. Additionally, the rotor shaft angle is tilted forward with respect to the fuselage in order to maintain a favorable fuselage attitude during high speed forward flight. During hover, the rotor disk needs to be tilted ‘backwards’, to account for the shaft tilt, and sidewards to account for the lateral force due to tail rotor thrust, so non-zero rotor cyclic angles become necessary in hover. More on the what is rotor cyclic control, and why it is necessary, later.
Definition¶
How do you define the hover state? Does the helicopter in the video below hover at any time during the shown manuever?
from IPython.display import YouTubeVideo
YouTubeVideo('Jk3HRrMhrjw', width=900, height=700)
No. At no point during the maneuver shown does the free stream velocity become zero with respect to the helicopter.
Hover at different MTOW¶
The maximum take-off weight (MTOW) of a given design can vary based on the amount of fuel and payload onboard. Clearly, even without considering the ability to achieve forward flight, a helicopter rotor has to be capable of producing varying amounts of thrust in order to balance the weight in these different scenarios. How is that achieved?
A wing can be made to generate varying lift via a number of mechanisms-
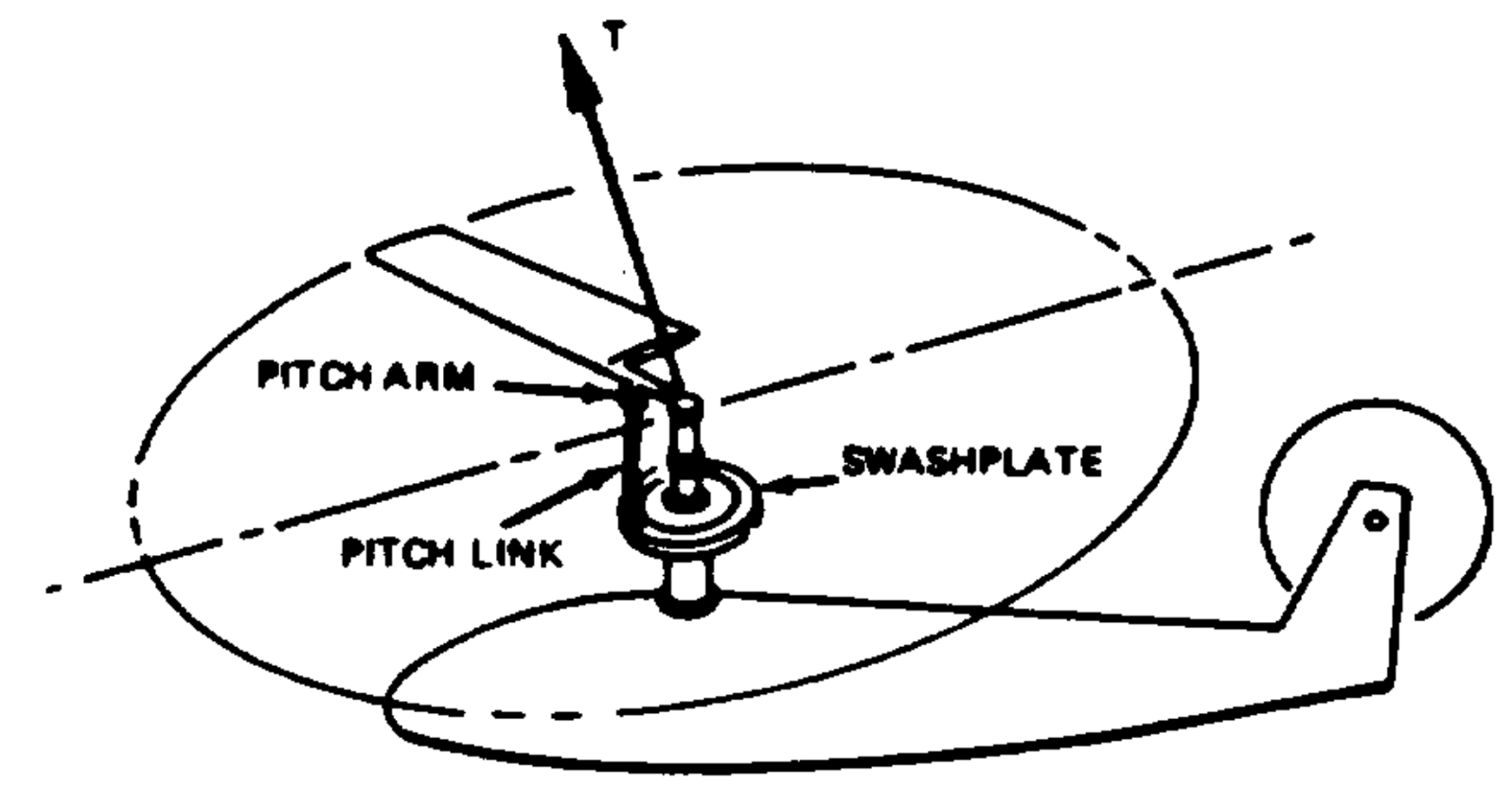
Helicopter rotor blade pitch control via swashplate [source]
vary area
change chord and/or radius
feasible but not a practical option
vary dynamic pressure
via RPM control
helicopters have a fixed RPM though! (gearbox restrictions)
vary \(\alpha\)
no direct control over \(\alpha\) (due to \(v_i\))
done by controlling blade pitch
While discussing airfoil aerodynamics, it is common to speak of the angle of attack as if it is a variable one has direct control over. While this works in the context of 2D aerodynamics, in the case of 3D (finite-wing) aerodynamics effects at the wing tips (see the following section) render \(\alpha\) a byproduct of the aerodynamics and pitch angle serves as the more relevant control variable in its stead. Helicopter rotors control the amount of rotor thrust by changing the pitch angle of all the blades collectively. This is achieved by movement of the swashplate up and down along the shaft axis and the resulting pitch angle component is refered to simply as the collective and denoted \(\theta_0\). The pitching motion of the blades itself is referred to as feathering (motion).
Flowfield¶
The rotor wake discussed within the momentum theory model consisted of a uniform inflow velocity at the rotor disk and, correspondingly, also at every cross-section of the rotor streamtube. There were no additional aerodynamic features that were included because of the simplicity of the uniform pressure difference actuator disk model. In reality, a rotor is composed of discrete number of blades i.e. the lifting surfaces of the blades are finite and do not cover the entire rotor disk (as is implicitly assumed in the momentum theory approach). Additionaly, the rotor blades have a finite span that leads to critical phenomena occuring at the blade tips i.e. at the outboard edge of the rotor disk.
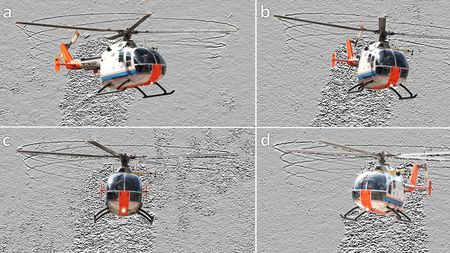
Bo 105 rotor wake visualized using Schlieren method [source]
tip vortex roll up
phenomena similar to fixed-wings
stronger than fixed-wing cases
blades generate most lift outboard
root vortex also exists but much weaker
usually not even modelled
induced velocity \(v_i\) is due to tip vortices
Biot-Savart law
It was mentioned earlier that, much like fixed-wing aircraft, helicopter rotor blades are finite wings (i.e. have a finite span) and exhibit similar aerodynamic phenomena of vortex roll-up at the tip. This contributes to additional power consumption because the blades are aerodynamically less efficient due to the vortex roll-up phenomena. You can think of it as an equivalent reduction in the rotor radius but instead of using an equivalent rotor radius, that is smaller than the radius of the real rotor being modelled, the effect is simply manifested via the \(\kappa\) parameter when using the momentum theory.
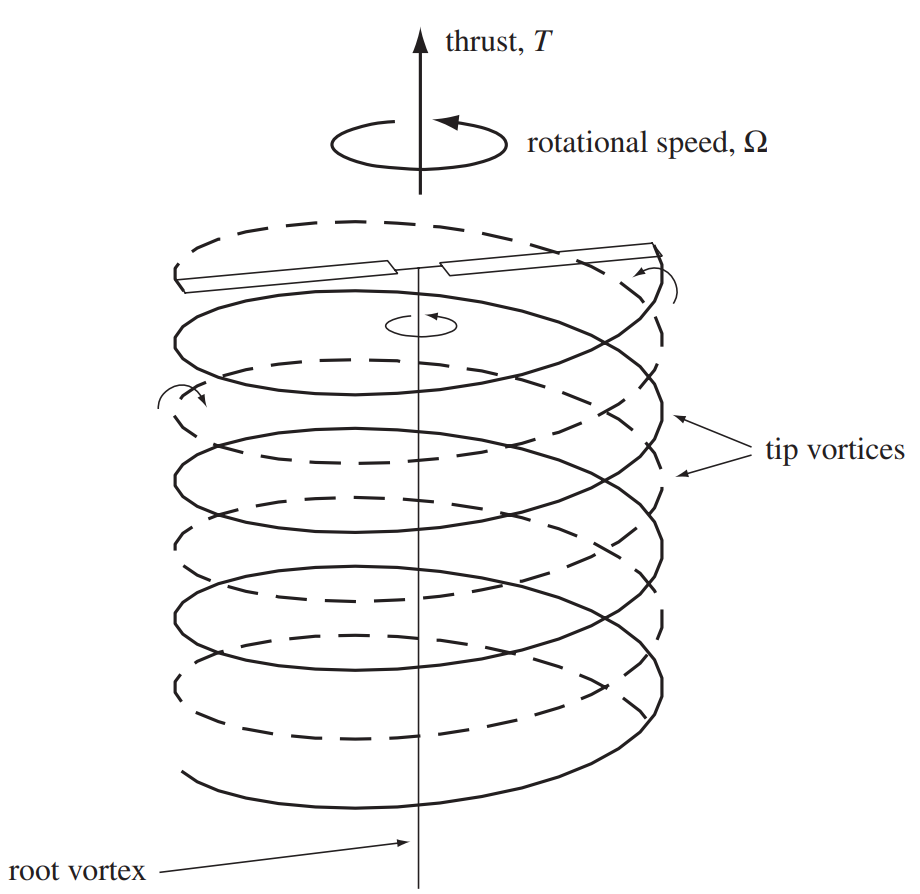
Right cylindrical rotor wake model using vortex theory (taken from Rotor Aeromechanics by Wayne Johnson)
from IPython.display import YouTubeVideo
YouTubeVideo('JXkWSgU-CL0', width=400, height=200)
from IPython.display import YouTubeVideo
YouTubeVideo('ViKYFsN3p24', width=400, height=200)
from IPython.display import YouTubeVideo
YouTubeVideo('lslarZiRJhg', width=400, height=200)
The right cylindrical wake model of a rotor, shown above, was first proposed by Joukowsky as the case of an ideal model [Kui18](Section 1.2). Such a wake structure is valid only in the limit of a lightly loaded rotor because otherwise wake contraction has to be accounted for in order to obtain accurate results. ‘Free-wake’ models are more commonly used to model rotor tip vortices as shown below. Here the tip vortices from the rotor blades evolve freely under the influence of one another. The induced velocity, from these vortices, is calculated using the Biot-Savart law and gives a more accurate estimate compared to the annular momentum theory that was introduced in the BEMT chapter. It is worth noting the constriction of the rotor streamtube in the wake of the rotor. This constriction has been observed to occur for rotors in reality and is something that the momentum theory captures as well.
Free-wake simulation of a 4 bladed rotor in hover flight
The above description of the effects of the trailing tip vortices on the induced velocity, and therefore on induced power itself, might make a casual observer remark that a straightforward implementation of design solutions used on fixed-wing aircraft to minimize induced drag might work just as well for rotors. Bell Textron Inc has recently procured a patent on that front but, as is true with any other patent application, there is limited supporting data provided whether the mechanism actually would perform its desired function without having any detrimental effects (viz. high vibration and high drag in forward flight). Forward flight performance is particularly relevant because induced power forms a smaller and smaller proportion of the overall power consumption as helicopter flight speed is increased.
Bell patent: Split-winglet on rotor blades [source]
Blade-vortex interaction¶
In order to accurately model a rotor in hover, the effect of the tip vortices needs to be captured with a high degree of accuracy. These strong concentrated tornadoes of air have a significant influence on the local aerodynamics at each blade section. This influence reduces with the distance from the tip vortex but that doesn’t mean that the inboard sections are shielded from this effect. As is clear from the foregoing discussion, tip vortices from preceding blades can pass close to the inboard sections of the following blades. In extreme scenarios like when the helicopter suddenly pitches during hover or during a descent maneuver, the blades end up passing very close to or even slicing through the tip vortices from preceding blades. This phenomenon is refered to as BVI (blade vortex interaction) and is a source of high vibrations felt within the helicopter fuselage and high noise radiation. Quite simply, this is due to sudden loading changes that occur on the blade as shown in the figure below.
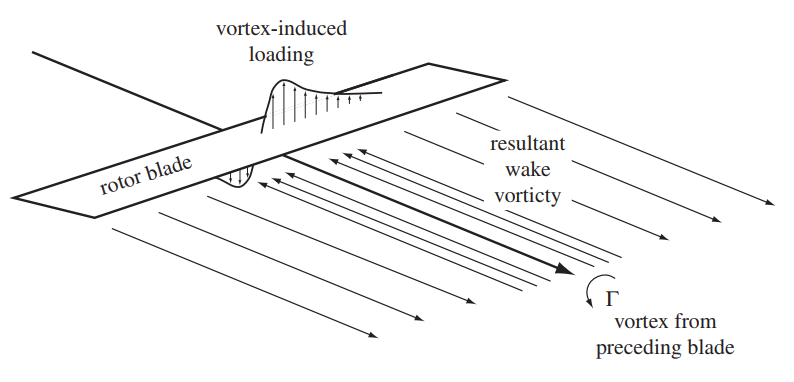
Schematic of blade-vortex interaction and the induce loading [source]
The angle of attack within of the blade sections influenced by the vortex changes suddenly thereby changing the aerodynamic loads. This change in angle of attack can be quantified if the velocity induced by the tip vortex interacting with the blade can be quantified. This is done using the Biot-Savart law that was originally proposed in the field of electromagnetism. The following presents the derivation of the expression and is based on the discussion in [Bat00](Section 2.4).
The velocity field within a fluid satisfies the following equations related to the rate of expansion of the fluid and local vorticity (\(\boldsymbol{\omega}\)), respectively -
Based on the Helmhlotz theorem, the velocity field can always be represented as a sum of the gradient of a scalar potential function (\(\phi\)) and the curl of a solenoidal field (\(\boldsymbol{B}\)) as -
In case of an incompressible fluid, the following equations are satisifed -
In which case, the velocity field is given by the equation -
Currently, the focus is on identifying the velocity field based on the vorticity field and in particular for cases where the vorticity is entirely within the fluid domain under investigation. In such a scenario it can be shown that \(\nabla . \boldsymbol{B} = 0\)
The solution to the above Poisson equation is given by -
where \(s\) is the distance from the point of vorticity to \(\mathbf{x_0}\). The velocity at a given position \(\mathbf{x_0}\) can then be obtained using the curl of \(\boldsymbol{B}\)-
Usually, the vorticity is idealised to be present along a line of zero thickness rather than over a volume as the above equation implies. Therefore, the following result is what is more commonly used to evaluate the induced velocity once the strength of the line vortex is known.
where,
This is the Biot-Savart law that is fundamental to evaluating the induced velocity at any given location due to vortices trailing from the tips of rotor blades. Usually this location of interest \(\mathbf{x_0}\) is the blade itself so that the instantaneous induced velocity \(v_i\), and by extension the angle of attack, can be accurately obtained. From the discussion carried out in the BEMT chapter, note that the component of \(\mathbf{u}(\mathbf{x_0})\) that is normal to the blade section defines \(v_i\).
Idealised vs real vortices¶
Ideal line vortices have all the vorticity concentrated in a limiting region of zero area. Which means if one were to use the Bio-Savart law to evaluate the induced velocity at a point close to the line vortex, the induced velocity could theoretically get infintely high. The scenario of tip vortices causing infinite induced velocity is not encountered in nature because the vorticity is distributed over a finite region, rather than concentrated at a point. One of simplest models of a finite vortex is the Rankine model (see below).
A schematic representation of the Rankine model of a finite vortex [source]
The velocity induced by the Rankine vortex is given by the following expression 1-
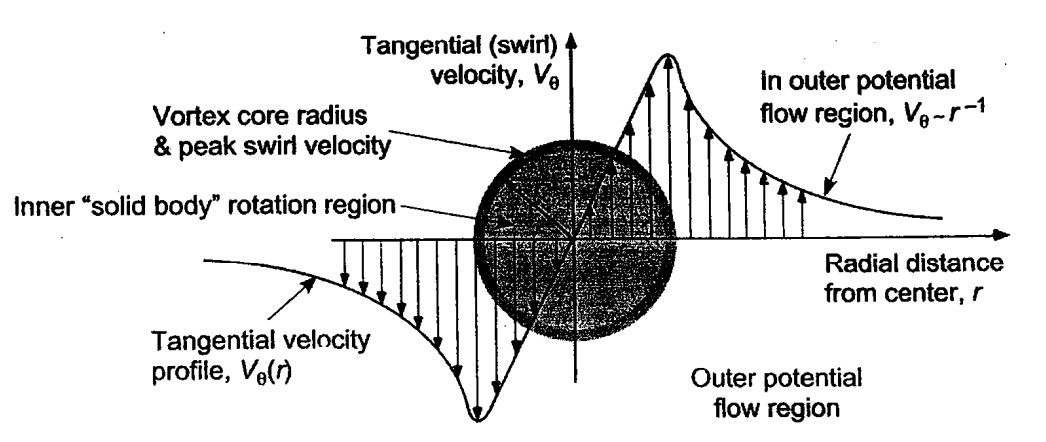
The region of finite vorticity is referred to as the core of the vortex and its radius \(r_c\) is defined by the radial location of highest tangential velocity about the center of the vortex. The total strength of the vortex is given by \(\Gamma\) but to evaluate induced velocity at points close to the center of the vortex (0<r<1), the vortex strength also scales down since the influence of circumferential vorticity outside cancels out.
The core radius decides the concentration of the vorticity within the vortex. The potential vortex is the ideal vortex in the limiting case of \(r_c=0\). As as eviden from the figure below, \(r_c\) influences the induced velocity close to the center of the vortex itself but the induced velocity quickly follows the same trend as the ideal vortex representation.
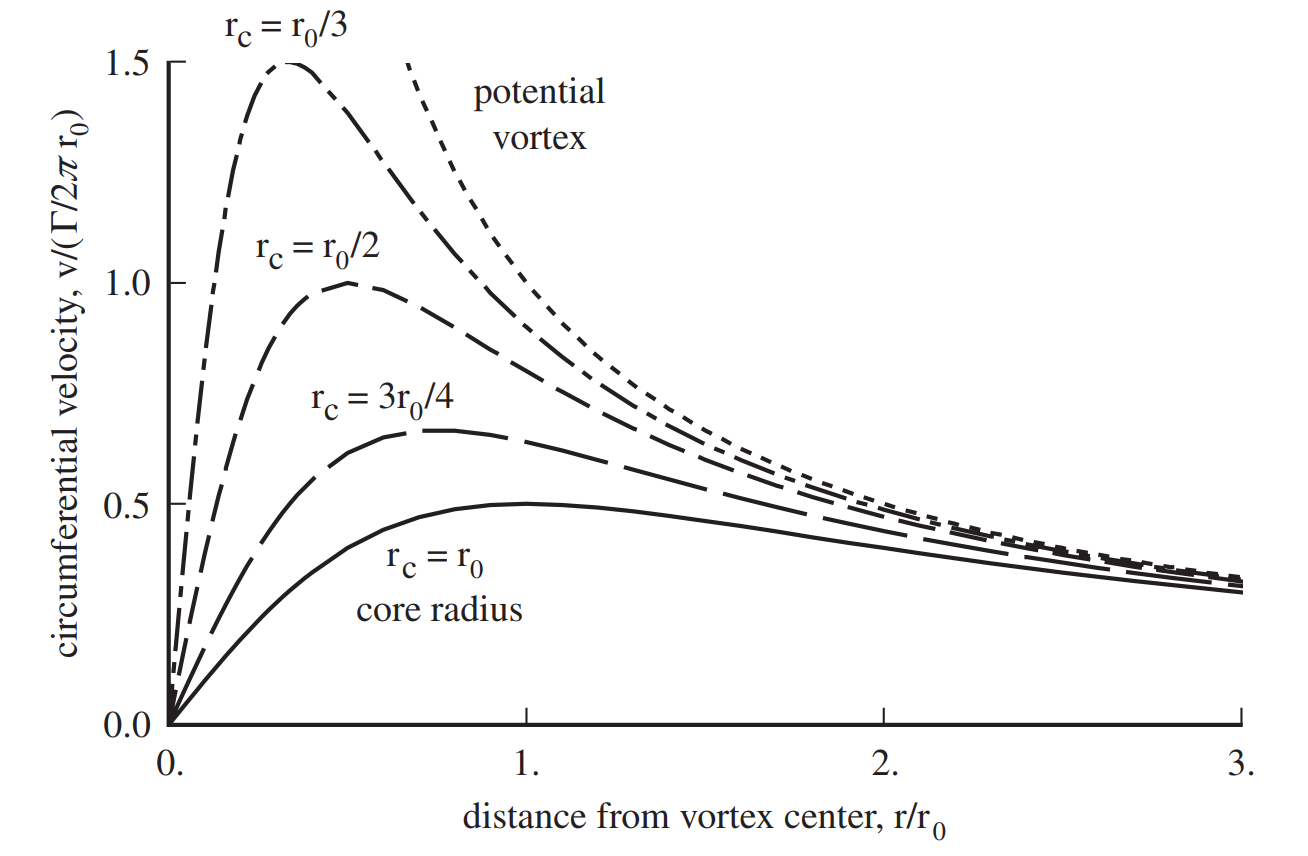
Effect of tip vortex core radius on circumferential velocity [source]
“Steady” aerodynamics hover¶
It might appear that the hover, given the symmetry of flow conditions and their steady state nature, would be computationally the easiest flight state to model. However, the simple fact remains that the trailing tip vortices do not quickly convect away from the rotor (how would they? small \(v_i\) is desirable, remember), unlike in fixed-wing flight. Consequently accounting for the influence of tip vortices on rotor blades is of paramount importance and small deficiencies in the modelling strategies can lead to inaccurate vortex strengths and/or trajectories. This in turn has an influence on the blade loads and vice versa - local blade aerodynamics affects the wake and the wake influences the blade aerodynamics.
The following show results from a rotor hover test carried out on a calm night on a whirl tower. The variations registered in the measurements suggest that slight unsteadiness associated with evolution of the tip vortices can have a non-negligible influence on the rotor aerodynamics. Fluctuations of ~1% are not negligible and a difference of 0.015 in FM distinguishes a better rotor from a good one.
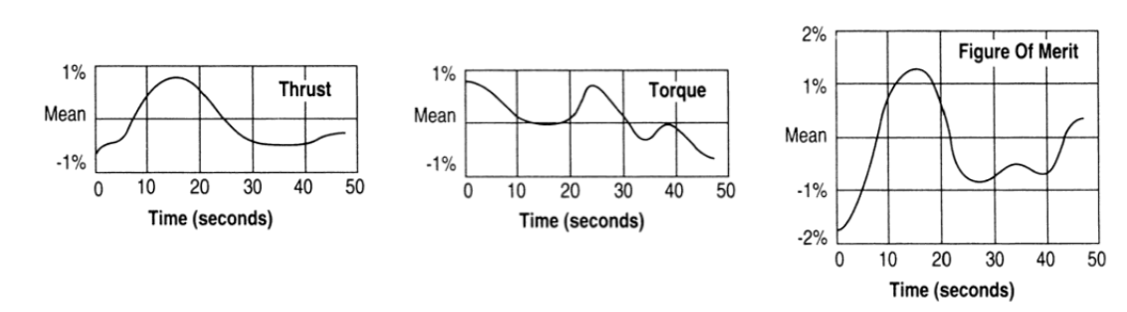
Variability in rotor performance in hover [taken from Helicopter Aerodynamics I by RW Prouty]
When analysing a coaxial rotor design in hover the situation is even worse. Due to the passing of lifting surfaces (i.e. blades) in close proximity to each other, the rotors no longer behave as the sum of two isolated rotors.



![[source]](https://en.wikipedia.org/wiki/Sikorsky_S-97_Raider#/media/File:Sikorsky_S-97_Raider_in_flight.jpg){kind=link}
![[source]](https://en.wikipedia.org/wiki/Sikorsky%E2%80%93Boeing_SB-1_Defiant#/media/File:Sikorsky%E2%80%93Boeing_SB-1_Defiant_(cropped).jpg){kind=link}
Sikorsky X2-like rotor in hover [source]
load oscillations due to blade passage
2\(N_b\) blade passes per revolution
vibration at 2\(N_b\)/rev
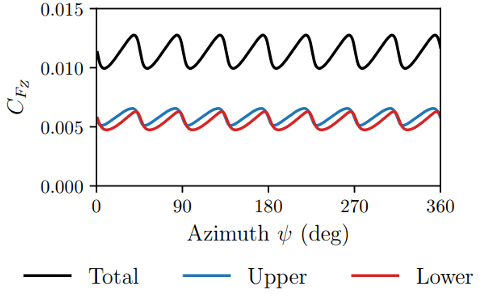
oscillation \(\approx 20\%\) of mean thrust
Aside
Do you think the fluctuating normal force coefficient CFz, as shown in the figure, generated by each rotor can be obtained using any of the theories that we have learnt so far in the course?
Such high thrust oscillations are intrinsic to coaxial rotor designs. High vibrations were one of the reasons that Sikorsky discontinued the XH-59A program (precursor to the succesful X2 demonstrator). They still exist on the Raider and Defiant designs, currently being extensively tested as a viable proposal to replace ageing helicopter fleet in the US armed forces, but are taken care of using vibration supressors.
Another aspect of rotor design worth mentioning here is from the structural design point of view. Consider for e.g. the cases of the Bo 105 rotor (\(R= 4.912\) m, blade weight \(m_b\approx 45\) kg, and \(\Omega = 44.505\) rad/s) and the UH60 rotor (\(R= 8.178\) m, blade weight \(m_b\approx 95\) kg, and \(\Omega = 27.017\) rad/s). The former is a 2.5 ton helicopter and the latter a 10 ton design.
The hinge where the blades are attached to the rotor head experience incredibly high radial forces because of centrifugal loads on the blades. If the blades are all exactly alike, these high loads are not of huge concern because they would be balanced by an equal centrifugal force on the other blades. For this reason, helicopter rotors are, much like propellers or turbine rotors, precisely built to specifications and with minimal engineering tolerances so that each blade is alike structurally and aerodynamically. However, during manufacturing slight mismatches do occur in structural mass distribution, for e.g., that lead to unbalanced forces acting on the rotor shaft resulting in the vibration felt within the fuselage. An ideal computational analysis of a rotor in hover - i.e. blades with matching properties and assuming azimuthal symmetry - will result in the induced vibration by the rotor being zero.
- 1
Note that the induced velocity due to a vortex has been interchangeably represented as \(V_\theta(r)\), \(v_i\), \(v\) etc but they are represent the same quantity - velocity induced at a location \(r\) or \(x_0\) due to the presence of a vortex in the vicinity.